
Without going into the long 4 year history of all the troubleshooting I’ve done and the disappointment experienced, here is the basic summary. This is an attempt to seek help/advice and to summarize where I’m at. I’ll modify/update this page as I move forward in my process.
This Dobsonian mount has the two standard motors on it. One for the Altitude (Alt), and one for the Azimuth (Az). The SynScan hand control connects to the Alt motor, and a standard ethernet cable connects from the Alt motor to the Az motor.
The hand controller or the SynScan Pro app over WiFi has a tracking feature, that is supposed to track a celestial object as it moves across the sky to relieve a person from having to manually adjust the telescope every couple of minutes. Currently I have no images of the Alt motor encasement.
What I’ve found to best summarize the problem is this.
1) The manual slewing of the telescope has 9 speeds, 1 through 9. 1 is for super slow slewing/movement, while 9 is for fairly fast slewing.
2) For speeds 2 through 9, slewing seems to work in all four directions as expected. Up, Down, Left, and Right
3) For speed 1, the slowest speed, slewing only works in 3 directions, Up, Down, and Left.
4) Slewing right at the slowest speed (1) makes some clicking like noises, but nothing happens.
This is the behavior both the Hand Controller, AND with the SynScan Pro app over Wifi, which leads me to believe it is not a software issue, and that it is most likely a problem with the Az motor.
Because tracking happens at the slowest speed, and usually involves tracking to the right when looking at the southern sky from the north as I do, I believe that’s why I got it to work exactly twice, and failed more times than I can count. I believe it’s because the two successes I’ve had didn’t require slewing to the right.
I have taken apart the encasement for the Az motor and ran the test again, with the clutch taken off to remove most of the friction in the system. And the problem is still persisting. Here is a video of the behavior when slewing left and right at different speeds.
What I don’t know for sure, and I’m seeking help to understand what I should do going forward is this. Is it most likely that the actual motor is malfunctioning? Or, could there possibly be something in one of the controller boards that would cause right at the slowest speed to not work?
My gut feeling is that, since there is a clicking noise in the mechanism at speed 1, that the controlling boards are probably sending the commands as expected, and the motor is having trouble executing on the request to move. It’s my belief/guess that only the motor requires replacement.
If this is all true, and assuming Sky-Watcher is not going to provide me a replacement motor, is there away to determine if there is an off-the-shelf replacement for this motor? If it turns out that one of the controlling boards is bad, is there a way to obtain a replacement for one of those boards? Or, am I simply out of luck, entirely reliant upon Sky-Watcher (Synta Technology Corporation of Taiwan) to offer to sell me a replacement part?
For the record, I have reached out to customer support. I’m told that they don’t have the part in stock, and that I should check back in a month. They offered no promises, and offered no option to order the replacement part. 🙁

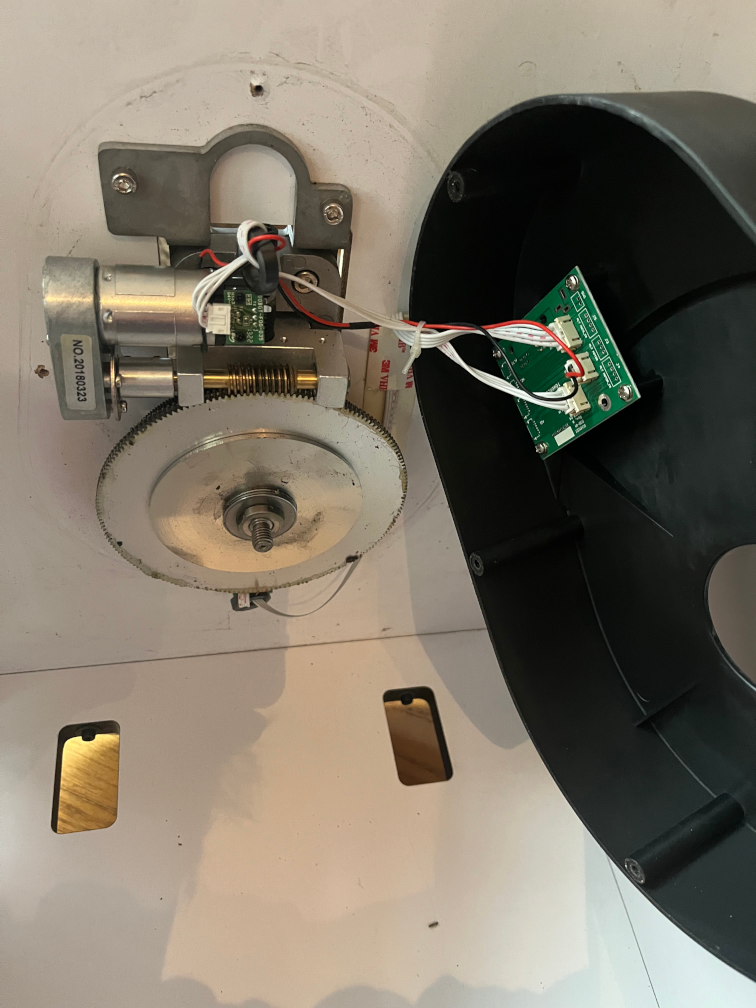
Above is the encasement prior to me removing the cover. Notice the only opening is for the ethernet cable that connects between the Az and Alt motor. The Alt motor contains the USB port and the port for the hand control unit.
Below is what it looks like inside, prior to me detaching the board containing the ethernet port from the cover.
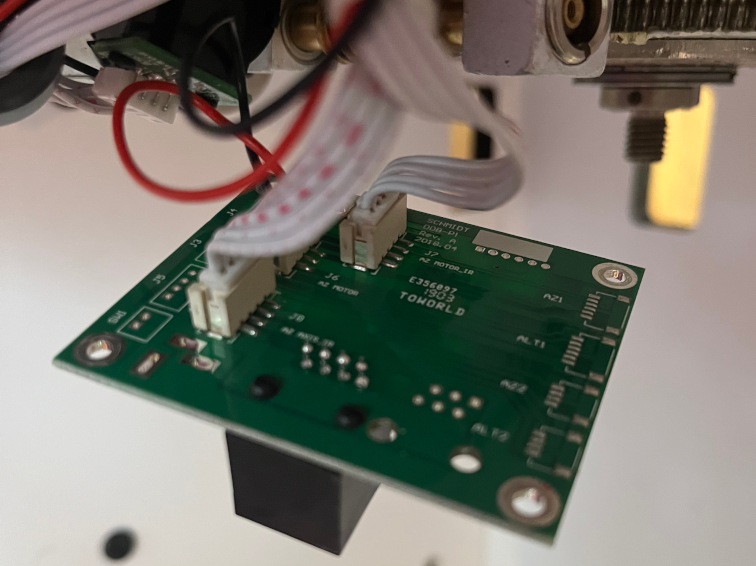
Next is a closeup of just the motor, with the attached circuit board that connects from the larger board with the ethernet port. This is the part I’m guessing needs to be replaced. However, without understanding what that circuit board does, it’s not clear to me if I need some proprietary motor/board combination, or, if this truly is some off-the-shelf item I can purchase somewhere.

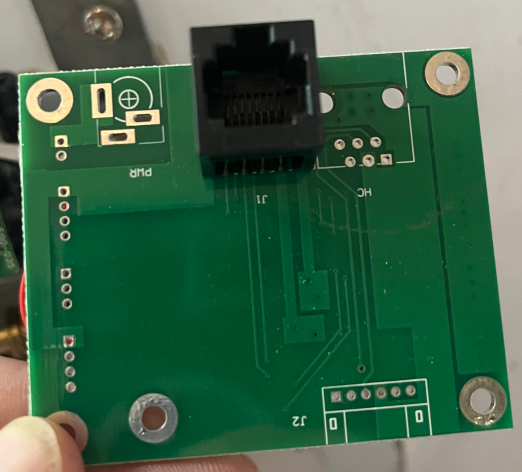
Below is the front and back of the board containing the ethernet port.
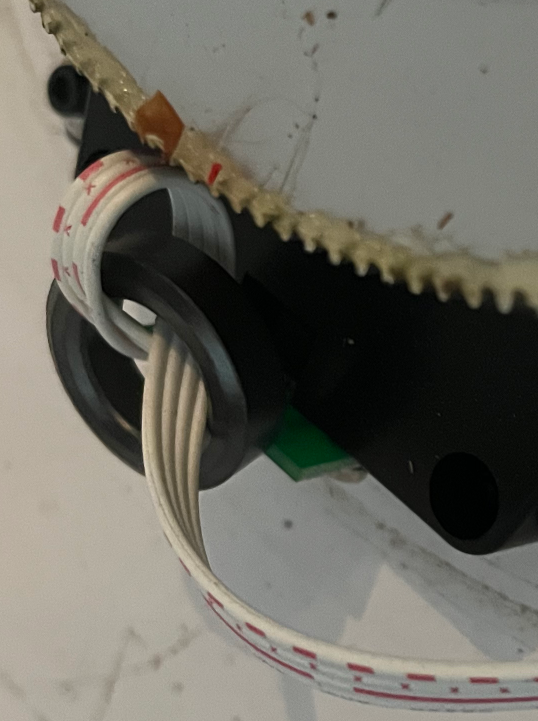
There is one final component which I didn’t get a good shot of as it’s underneath the main gear. My best guess is that its possibly just a feedback device so that when the gear is instructed to move, this attached device can confirm how much it’s moved. This is a wild ass guess, and I could be totally wrong.
Leave a Reply
You must be logged in to post a comment.